Remote Visual Inspection (RVI) is a nondestrucutive testing technique dating back to the 1970s that uses various types of videoprobes, video borescopes, remotely operated cameras, robotic crawlers, drones, and other specialized tools in order to remotely examine components for corrosion and damage. There are several different methods of RVI that can be used to inspect a variety of equipment.
In its most basic form, an RVI system is made up of a lens and an illuminating light source, both of which are connected to a light transmitting extension, at the end of which is attached a viewing eyepiece. Most modern designs though, are more complex. Several make use of fiber optics or distal LEDs as light sources. On-board computers can also be utilized to improve functionality of the systems.
Three RVI Methods
The three major methods of RVI are (1) Comparison Measurement, (2) Stereo Measurement, and (3) Shadow Measurement.
Comparison Measurement
The comparison measurement method is based on a known reference dimension in the inspection image, which is used to measure other objects in the same view and plane. The object used to provide a reference dimension can also have been set in place by the instrument manufacturer or introduced with the probe. For this method, comparison measurement accuracy depends on two factors: the distance from the distal end of the borescope to the object, and the degree to which the object plane is perpendicular to the borescope camera.
Stereo Measurement
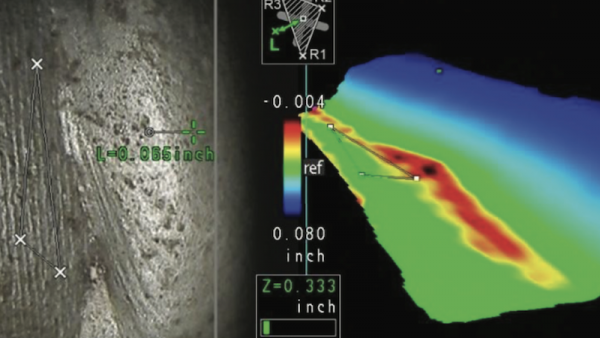
The stereo measurement method on the other hand, which is also sometimes known as stereo probe measurement, uses a prism or dual lens to split images, allowing the camera to capture left and right views with a precise angle of separation. The position of user-placed cursors is then analyzed using a computer algorithm and triangulation geometry is applied to them to obtain accurate measurements. The accuracy of this method depends on the separation distance between the prism or dual lens and on the distance of the distal end of the borescope from the object being measured. The sharpness and contrast of the image in question are also very important for the accuracy of the measurement. Unlike other methods, the stereo method does not depend on perpendicularity between the object plane and the video borescope distal tap.
Shadow Measurement
The final method, shadow measurement, relies on a shadow triangulation of tip-to-target distance. A device known as a shadow measurement tip projects a shadow across the area being inspected. Thus, the positioning and size of the shadow in the resulting image is directly related to the distance from the tip to the object. With this information, the shadow measurement system can accurately calculate the size of any features or defects. The accuracy of this method depends on the distance from the distal end of the borescope to the object being examined. Image sharpness and contrast are less important than with the stereo method. The object plane must be perpendicular for some types of measurement and may be skewed for other types of measurements.
RVI Applications
RVI can be used to examine equipment as diverse as boilers, steam and gas turbines, generators, heat exchangers and condensers, tanks and vessels, rotating equipment, welds, and piping systems for flaws and corrosion. Used with extraction tools, RVI also has applications in foreign object search and retrieval.
Advantages
The primary advantage of RVI is that it allows for the examination of most plant systems and components without requiring confined space entry or disassembly. It can therefore be considerably less expensive than other methods. Likewise, it’s far safer than traditional methods of inspection that involve sending inspectors into unsafe conditions.
Relevant Links
Topic Tools
Share this Topic



Contribute to Definition
We welcome updates to this Integripedia definition from the Inspectioneering community. Click the link below to submit any recommended changes for Inspectioneering's team of editors to review.
Contribute to Definition